
Wenn Menschen nach Erdbeben nach Verschütteten suchen, gefährden sie sich mitunter selbst – im Bild eine Aufnahme nach dem Beben im italienischen Amatrice im August.
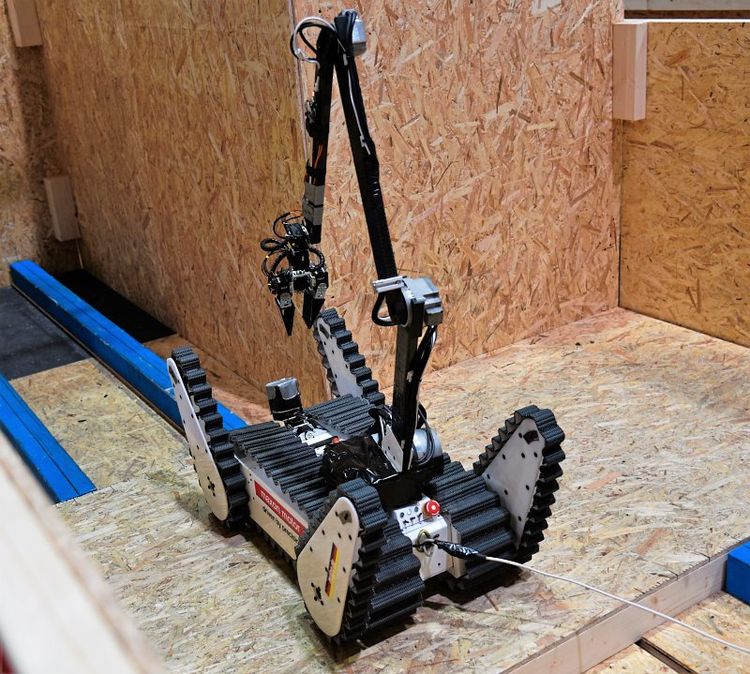
Der Rettungsroboter Trudi soll künftig nach Erbeben oder anderen Katastrophenfällen im urbanen Gebiet selbstnavigierend zu Verschütteten vordringen. Im nächsten Entwicklungsschritt soll sein Greifarm verbessert werden.
Spittal an der Drau – Das Fahrzeug fährt auf die Holzrampe zu, zögert kurz und schiebt sich dann langsam, aber sicher darüber hinweg. Es handelt sich aber nicht um ein Spielzeug, sondern um ein Projekt mit ernstem Hintergrund: Der Rettungsroboter trägt den Namen Trudi und soll in Zukunft bei Katastrophenfällen wie Erdbeben oder nach Unfällen zum Einsatz kommen. Trudi steht für "Third Roboter for Urban Disaster Intervention" und wurde von einem Team der Fachhochschule Kärnten entwickelt und gebaut.
Die Studierenden der Bereiche Systems Engineering und Systems Design können dabei auf praktische und überaus nützliche Weise zeigen, was sie gelernt haben und welche Möglichkeiten die Robotik in Zukunft noch bieten wird.
Rettungsroboter werden vom Militär, von der Feuerwehr und der Rettung in Einzelbereichen bereits eingesetzt, etwa nach dem Einsturz von Tunneln. Allerdings handelt es sich meist um größere Geräte. Kleine, mobile Roboter für Rettungsmissionen sind hingegen noch selten.
Keine Gefahr für Menschen
Das Kärntner Modell Trudi wäre ein Beispiel, welche Möglichkeiten eine solche Maschine bieten könnte: In eingestürzten Gebäuden könnte der Roboter nach verschütteten und verletzten Menschen suchen, ohne dass sich dafür menschliche Hilfskräfte selbst in Gefahr begeben müssen. "Unser Ziel ist ein Modell, das rund 50 Kilogramm wiegt und beispielsweise im Kofferraum transportiert werden kann", sagt Wolfgang Werth, Studiengangsleiter Systems Engineering und Systems Design der FH Kärnten. Einsatzbereiche wären dann all jene Bereiche, in denen große Roboter nicht durchkommen.
Ziel des Roboter-Teams ist es nun, ihre Entwicklung in puncto Fahrbarkeit und Intelligenz bestens auszustatten – wobei Intelligenz vor allem selbstständiges Navigieren bedeutet.
Autonome Navigation
Der Roboter soll in einem unbekannten Gebiet zunächst eine Karte der Umgebung erstellen, um dann zu analysieren, welche Bereiche für ihn befahrbar sind. Dort kann er dann nach Verletzten Ausschau halten. Das ist in der Praxis sinnvoller, als das Gerät von außerhalb mittels Kamera zu steuern, denn bei Katastrophen könnte die Sicht dafür nicht ausreichen – etwa weil dichter Rauch vorhanden ist.
Die nächsten konkreten Schritte, um Trudi für einen Praxiseinsatz fit zu machen: das Fahrwerk weiterentwickeln und den Greifarm verfeinern.
Wie eine Baumaschine
"Nun soll Trudi mit diesem Arm auch schwierigere Aufgaben erledigen können, etwa ein Ventil öffnen", sagt Werth. Letztlich soll der Roboterarm beinahe wie ein menschlicher Arm funktionieren. Um reale Rettungseinsätze durchführen zu können, wird es außerdem nötig sein, Trudi unempfindlich gegen Schmutz und Staub zu machen; der Roboter muss so robust sein wie eine Baumaschine. (Robert Prazak, 24.12.2016)