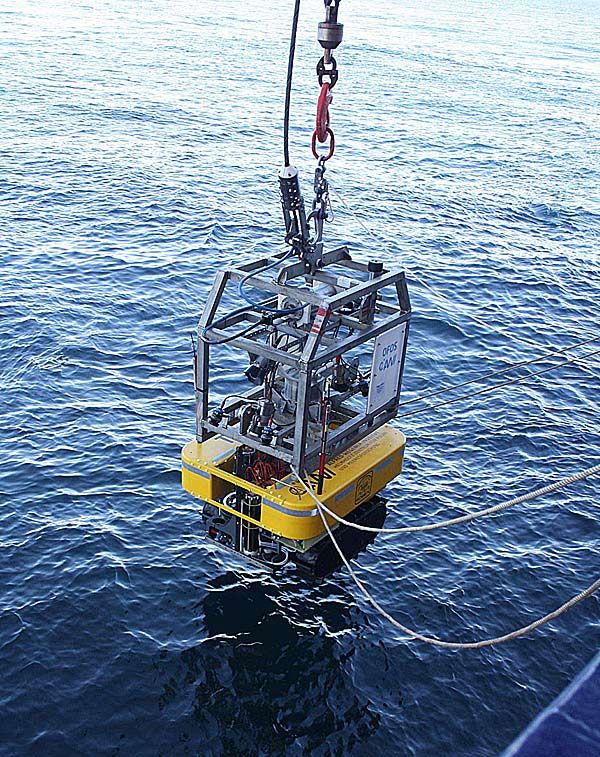
Tramper begibt sich an seinen ungemütlichen Arbeitsplatz.
Bremerhaven – Ein Jahr soll die Mission von Tramper dauern: Nach dem erfolgreichen Absolvieren eines Testlaufs ist der Unterwasserroboter zum Grund der Arktis abgetaucht, wie das Alfred-Wegener-Institut (AWI) berichtet. In 2.500 Metern Tiefe wird der "Tiefsee-Crawler" nun ohne jede Steuerung von außen über den Meeresboden wandern, um Sauerstoffmessungen durchzuführen. Schlafen, fahren, fotografieren, messen und dann wieder eine Ruhephase einlegen: Insgesamt 52 Mal wird sich der AWI-Roboter in diesem Rhythmus bewegen.
Am 11. Juli brachte ein videogeführtes Aussetzsystem den Roboter sicher an den Meeresgrund, wo er nun jede Woche seine Messungen durchführen soll. Dabei bewegt er sich zunächst 15 Meter, um eine ungestörte Fläche zu erreichen. Eine Bilderkennungskamera prüft dort die Oberfläche: Sollten Steine oder ähnliches zu erkennen sein, fährt Tramper noch einmal zwei Meter weiter. Anschließend erfolgt eine hochauflösende Fotografie der Messstelle, bevor die eigentliche Messung beginnt. Dabei werden Sensoren in kleinen Schritten von 0,1 Millimeter in das Sediment gefahren, die die Sauerstoffverteilung im Meeresboden messen.
"Nach der Messung legt sich Tramper für eine Woche schlafen, um Energie zu sparen. Schließlich soll er über 52 solcher Messzyklen durchführen – und das bei einer Temperatur von minus 1,8 Grad Celsius, die die Batterien stark fordert", sagt der Biologe Frank Wenzhöfer.
Langzeitbeobachtung
Die Wissenschaftler wollen mit den Tramper-Messungen die Aktivität der Mikroorganismen am Meeresboden erforschen. Anders als bei herkömmlichen Expeditionen während der eisfreien Sommermonate soll dabei mehr als nur ein "Schnappschuss" herauskommen. "Darüber lassen sich Aussagen treffen, wie das Ökosystem des arktischen Meeresbodens auf Umweltveränderungen reagiert. Solche Daten fehlen uns noch gänzlich für die Arktis", so Wenzhöfer. (red, 18. 7. 2016)